



Weekly Update 2 of 8 (Part 2)
Miles' Team
Pneumatic systems are regarded as one of the more difficult systems to work within robot combat. The 30-pound weight limit in this competition is the lowest weight class that a pneumatic system is even feasible. Large tanks are heavier than smaller tanks and require more armor to protect, but they also hold more air to use. This problem presents itself as a very delicate balancing game. Go to large on the tank, and the armor of the robot will suffer, or go too small on the tank and the robot won't have enough air for more than a few flips. Fortunately, many paintball and airsoft mechanisms use compressed air tanks and are designed to be handheld. These tanks are excellent for the 30-pound weight class, where heavier weight classes sometimes need custom made solutions.
Kenan's Team
The rules of MRDC state that flying entries need to have a video demonstrating controlled flight sent to the MRDC Committee by February 7th. We've already ordered all of our parts, most of which are already in. Our goal is to have the robot flying by the end of next week, only with teleoperation control, instead of Autonomous. Once we get the Robot flying, we are going to dive into the autonomy programming, which we expect to take up most of our time designing.
Nolan's Team
Most of our CAD is fully designed with layouts of where everything in our robot is going to be. We placed the order for our motors, so we should be able to start prototyping our whole robot soon. Over the past wee,k we have been prototyping various aspects of the robot, specifically the lifter mechanism. We worked in the shop making a rough design of our lifter.

Weekly Update 2 of 8 (Part 1)
Jaicie's Team
We are planning on having a shop day this weekend to start building the steel shell. Plasma cutting will make it easy, but we have to decide the best and most efficient way to split the armor so that it is easily removable, but not a weakness. We are also going to design some custom 3D printed wheels and mount treads on them.
Lincoln's Team
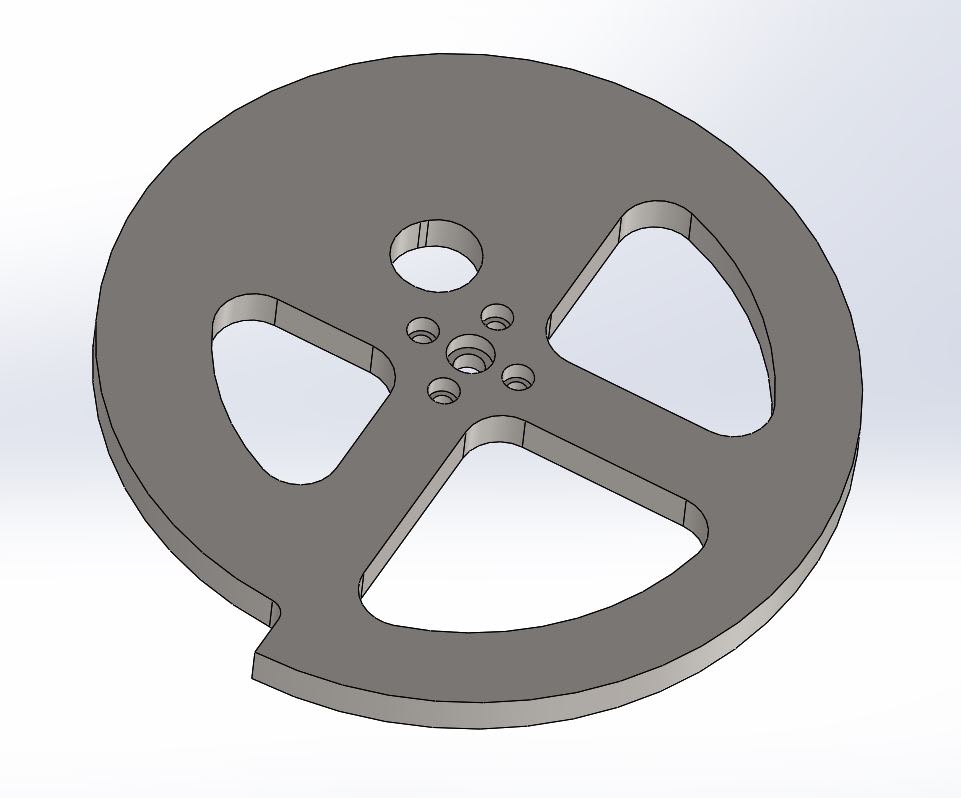
While the drive system is a major part of robot combat, it wouldn't be combat if there weren't any weapons. Our robot design utilizes an undercutter disk, which is a large disk that spins very close to the ground. Lots of physics goes into designing the weapon, such as kinetic energy equations and center of mass. Thankfully, we have modern Engineering Software to help us with that. Solidworks allows us to find the center of mass of an object that is designed in CAD. This is important, even if the center of mass is slightly off of the center of rotation there will be violent vibrations. The result can give some very interesting looking designs. For example, our weapon disk has a very odd shape, with four cutouts of various size around the disk. Despite this oddity, the center of the mass is directly in the point of rotation. Thanks to Solidworks, we are sure our weapon will spin up smoothly!
Nate's Team
Savvy observers may have noticed that budget team is utilizing a traditional twelve-volt lead acid battery. While newer, lighter, lithium batteries would usually be a great, go to solution; cost is the highest priority on budget team. The size of this robot requires that the battery store at least ten amp hours and be able to output very high currents in small bursts. While LiPo batteries can output tremendous currents, the cost of a LiPo with that high a capacity would cost hundreds of dollars. Lead acids, despite being rather heavy, are able to deliver a tremendous amount of power for only one-tenth the cost of similarly sized LiPo battery.


Weekly Update 1 of 8 (Part 2)
Miles' Team
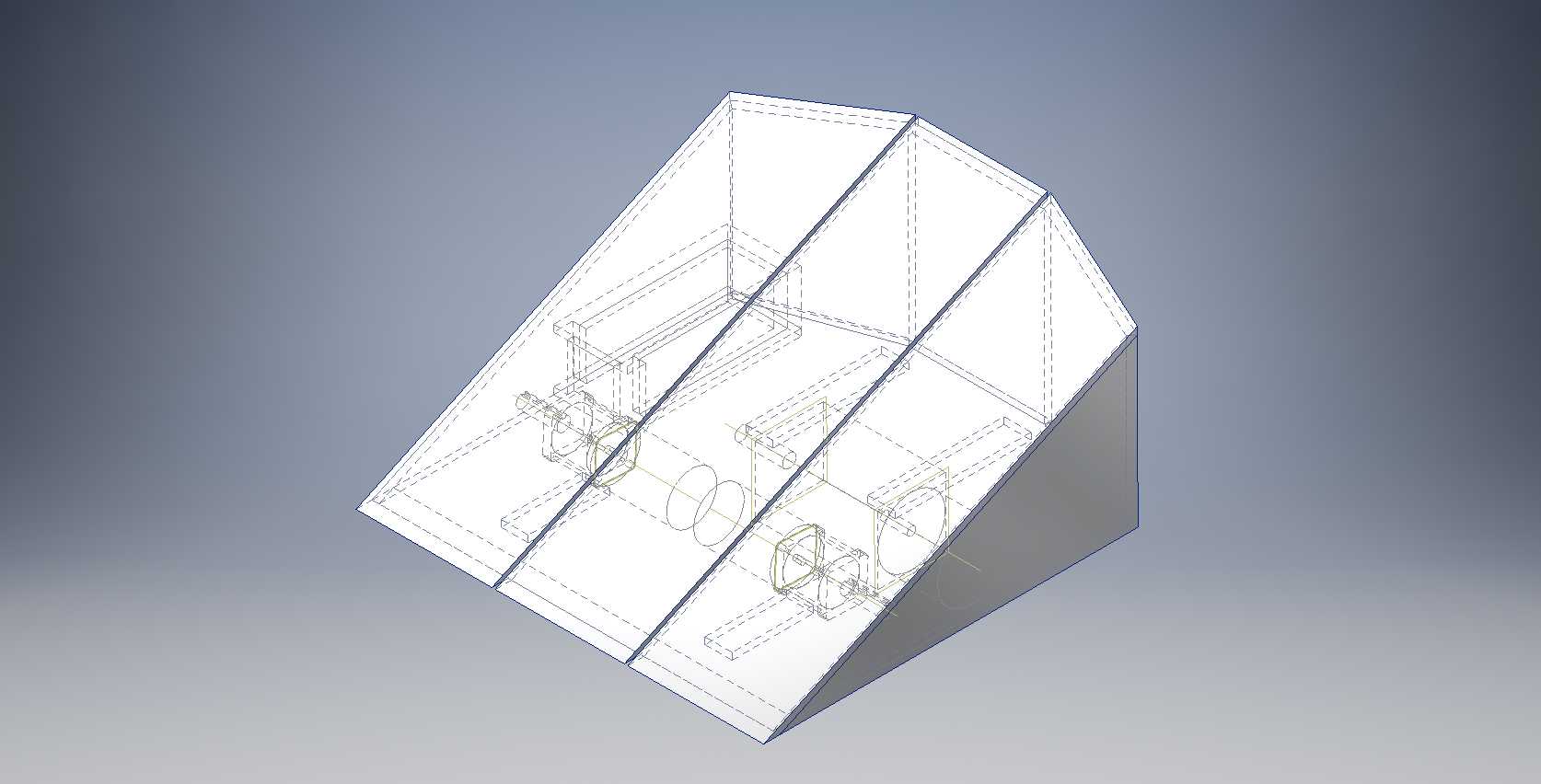
Our robot is designed to launch the opposing team into the ceiling of the arena. We are using a pneumatic driver system for the weapon, which gives us about 125 lbs of force at the main contact point of the arm. Our sides are slanted and will be held down with magnets to counter other launching robots, this allows spinners and other striking weapons to glance off our armor while keeping us glued to the ground. Finally, our back end is tapered to a point to allow it to be used as a backup wedge weapon should our primary weapon fail.
Kenan's Team
This year at MRDC, we are challenging ourselves to make a fully autonomous drone. Rules at MRDC state that autonomous entries get a four times multiplier and airborne entries get a two times multiplier. Mixing the two together results in a eight times multiplier. With that large of a multiplier, we really only need to complete two of the tasks to get a score higher than any non autonomous ground based entries can possibly get. This reward does not come without risk though. GPS sensors have a error of about 2 meters, meaning we will have to find another solution. Furthermore, our design will have to be able to identify and path to the foam balls, all without crashing. We have a few ideas of how to deal with these problems, and hopefully, we will have the first every autonomous drone entry at MRDC
Nolan's Team
Our robot design is a lifter mechanism. Instead of relying on a heavy kinetic energy weapon, our design attempts to pin robots up against the wall. Once they are unable to move, they are counted out as a KO. It's a very nondestructive approach to combat, however, it can be very effective. In fact, the grand champion at Robobrawl last year was a lifter.


Weekly Update 1 of 8 (Part 1)
Jaicie's Team
We wanted the body design to act as a secondary weapon and defense should our active weapon fail. We decided to angle each side to act as a ramp so the robot could disable, trap, or flip other bots. In addition, an angle lowers the amount of direct force from a hit. It is also low to the ground to counter any flipping mechanisms. The weapon itself will act much like a lawnmower blade, though without any sharp edges. The final fabrication will feature a "double teardrop" shape to put the most force behind a singular point of contact. In essence, the overall design was inspired by small aspects concerning force maximization and minimization in physics.
Lincoln's Team
The inspiration for our robot was to build a robot that would always retain its ability to drive. In battlebots, you can spend hundreds of hours building a perfect weapon system, but a perfect weapon does you no good if your drive system is disabled in one hit. Without the ability to drive, your robot will be counted as a KO. We aren't ready to share all of our robot's design, however, we are confident our drive system will be very resistant to damage. The wheels themselves will be fully encased, which will ideally prevent anything from being knocked loose.
Nate's Team
The Budget Bot is built each year with the very specific constraint of very little funding. The vast majority of parts are either recycled or made in house from scrap. The Budget Bot is an exercise in resourcefulness and despite the harsh budget constraint, it has made it to the final round every year it has completed. Last year, the Budget Bot (and many of the robots at MRDC) struggled with getting up a ramp on the course. This year, we doubled the number of drive motors and are testing the ability to drive up the ramp early.



Saluki Funder Page Launch
Our Saluki Funder page just launched, meaning donations are now open. Our Saluki Funder will run until February 14th, and our goal is to raise $6,200.
Stay posted for an update every Friday until our competition on March 8th.
As always, make sure to follow us on Facebook (link), and go Salukis!
- Lincoln Kinley
First Update
Hey there!
Thanks for checking out the updates page! We don't have anything yet since the Saluki Funder page just started. Check back every Friday for a weekly update!
- Lincoln Kinley
$25
Hardware
$25 will purchase hardware to build our robots. Including steel, aluminum, and other materials, hardware is the building blocks for creating a robot.
$50
Motor
$50 will purchase a motor to put on our robot. This will get our team moving!
$100
Battery
$100 will help us purchase a battery for our robots. You'll literally be giving our team power!
$200
Budget Robot
$200 will cover the whole cost of the budget robot competing at the Midwestern Robotics Design Competition.
$500
Basic Robot
$500 will cover the cost of designing and fabricating a basic robot.
$1,000
Competition Grade Robot
$1000 will cover the cost of designing and fabricating a competitive robot.
